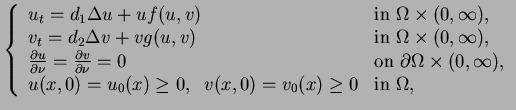
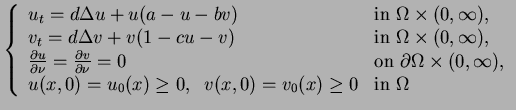
In this paper we study the global behavior of solutions to the
reaction-diffusion system :
In the system (1.1) ![]() and
and ![]() are
nonnegative functions which represent the population densities of two competing
species.
are
nonnegative functions which represent the population densities of two competing
species. ![]() and
and ![]() are the diffusion rates of the two species,
respectively.
are the diffusion rates of the two species,
respectively. ![]() and
and ![]() denote the intrinsic growth rates,
denote the intrinsic growth rates, ![]() and
and ![]() account for intra-specific competitions,
account for intra-specific competitions, ![]() and
and ![]() are the coefficients
for inter-specific competitions. For details on the backgrounds of this model,
we refer the reader to [6].
are the coefficients
for inter-specific competitions. For details on the backgrounds of this model,
we refer the reader to [6].
Remark. The linear functions for ![]() and
and ![]() as in
as in
![]() are often used in the classical competition-diffusion
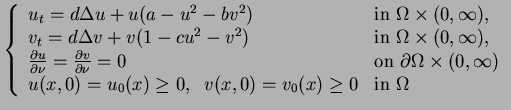
systems. Though the quadratic functions for
are often used in the classical competition-diffusion
systems. Though the quadratic functions for ![]() and
and ![]() as in
as in
![]() may not be used commonly, they make the system (1.1)
the
gradient system of an energy functional (after simple scalings) which helps
one to analyze the system (1.1) more clearly. And, in the course of this
paper it will be shown that the system (1.1) with
may not be used commonly, they make the system (1.1)
the
gradient system of an energy functional (after simple scalings) which helps
one to analyze the system (1.1) more clearly. And, in the course of this
paper it will be shown that the system (1.1) with
![]() has
similar properties as the system with
has
similar properties as the system with
![]() .
.
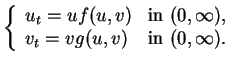
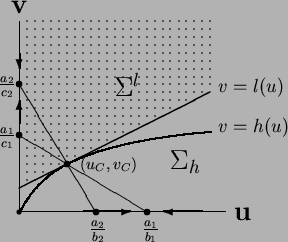
The global behavior of solutions to the system (1.1) is related to that of its kinetic system which is the following system of ordinary differential equations :
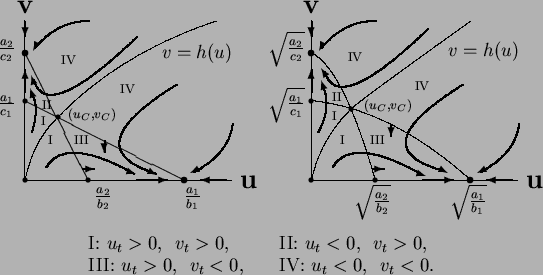
For the general properties of separatrix ![]() of the kinetic
system (1.2) which is illustrated in Figure 1
we refer the reader to the result due to Iida et al. [2] which is stated
in Proposition 1.1 in the following. The reader may also refer to
Hirsch and Smale [1], Ninomiya [5] for the
properties of separatrices.
of the kinetic
system (1.2) which is illustrated in Figure 1
we refer the reader to the result due to Iida et al. [2] which is stated
in Proposition 1.1 in the following. The reader may also refer to
Hirsch and Smale [1], Ninomiya [5] for the
properties of separatrices.
 .
.
In order to state our main results we introduce the notation which will be
used throughout this paper, and reduce the system (1.1) with ![]() and the strong competition condition (1.3) to a simpler form.
and the strong competition condition (1.3) to a simpler form.
Notation. We set
![]() , where
, where ![]() is a strictly increasing
is a strictly increasing ![]() -function with
-function with
![]() . We denote
. We denote ![]() the tangent line of
the tangent line of ![]() at the unstable
constant equilibrium
at the unstable
constant equilibrium
![]() in the phase plane.
in the phase plane.
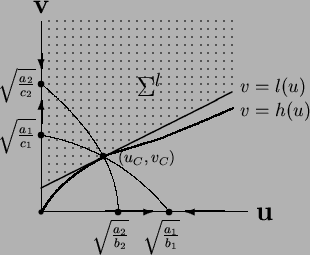
The competition-diffusion system (1.1) with ![]() and linear competitions as in
and linear competitions as in
![]() is reduced to the following system :
is reduced to the following system :
The competition-diffusion systems (1.1) with ![]() and
quadratic competitions as in
and
quadratic competitions as in
![]() is reduced to the following system :
is reduced to the following system :
 and
and
 , and then using the variables
, and then using the variables  , and
, and
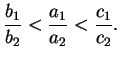
For both systems (1.4) and (1.5) the strong competition condition (1.3) is reduced to
Remark. In the proofs of
Theorems 1.1 and 1.2
the concavity of the graph of the function ![]() plays an important role.
Regarding the system (1.4) the concavity of
plays an important role.
Regarding the system (1.4) the concavity of ![]() is proved by
Iida et al. [2] as stated in Proposition 2.1. We prove similar
but partial result for the system (1.5) in Proposition 2.2.
A sufficient condition on the coefficients
is proved by
Iida et al. [2] as stated in Proposition 2.1. We prove similar
but partial result for the system (1.5) in Proposition 2.2.
A sufficient condition on the coefficients ![]() ,
, ![]() ,
, ![]() to guarantee
that
to guarantee
that
![]() for
for ![]() is found in Proposition 2.2 (vi).
is found in Proposition 2.2 (vi).
The properties of separatrix which are needed during the constructions of
domains of attraction are studied in Section 2.
In Section 3 we obtain the invariance of the set
![]() for the flow (1.4) and (1.5). We present lemmas regarding
auxiliary functions which are used in the proofs of Theorem 1.1
and Theorem 1.2 in Section 4. The proofs of
Theorem 1.1 and Theorem 1.2 are given in
Section 5 and 6, respectively.
for the flow (1.4) and (1.5). We present lemmas regarding
auxiliary functions which are used in the proofs of Theorem 1.1
and Theorem 1.2 in Section 4. The proofs of
Theorem 1.1 and Theorem 1.2 are given in
Section 5 and 6, respectively.